大家好,我是GitHub找项目君,每天为大家介绍GitHub上的开源项目
我们每天分享开源项目,根据开源协议都可以赚钱
ROS 实时目标检测
镜像代码:
http://www.gitpp.com/kysq/darknet_ros
项目介绍
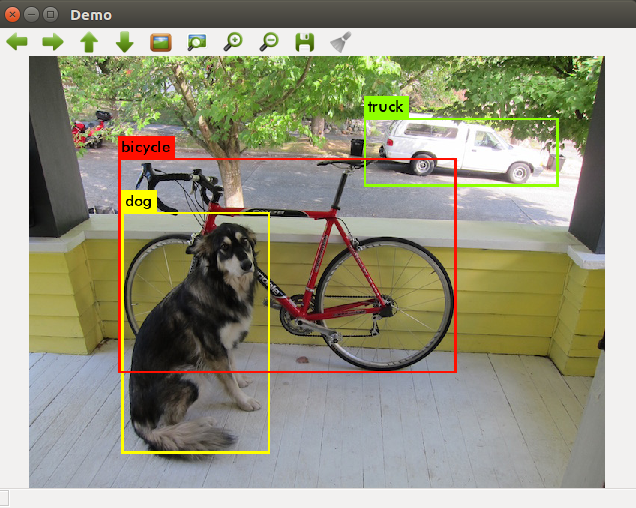
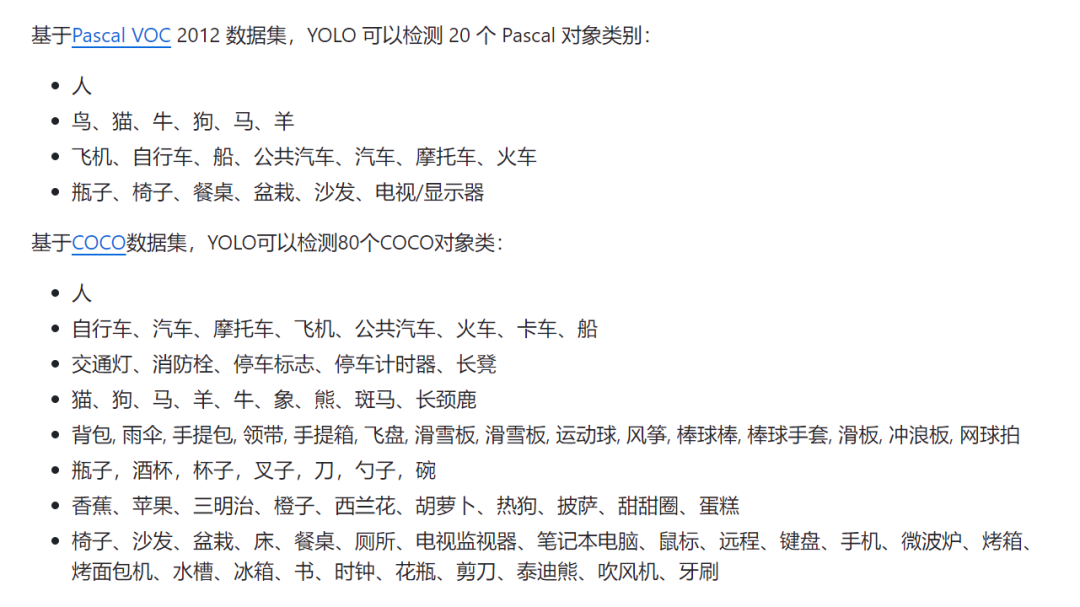
darknet_ros 是一个开源的 ROS 包,专门用于相机图像中的对象检测。它基于 YOLO(You Only Look Once)算法,这是一种先进的实时对象检测系统。darknet_ros 允许用户在 GPU 和 CPU 上使用 YOLO(V3)进行对象检测。该包包含预训练的卷积神经网络模型,能够检测预训练的类,包括 VOC 和 COCO 数据集中的对象。此外,用户还可以使用自己的检测对象创建网络。
该 ROS 包的主要特点包括:
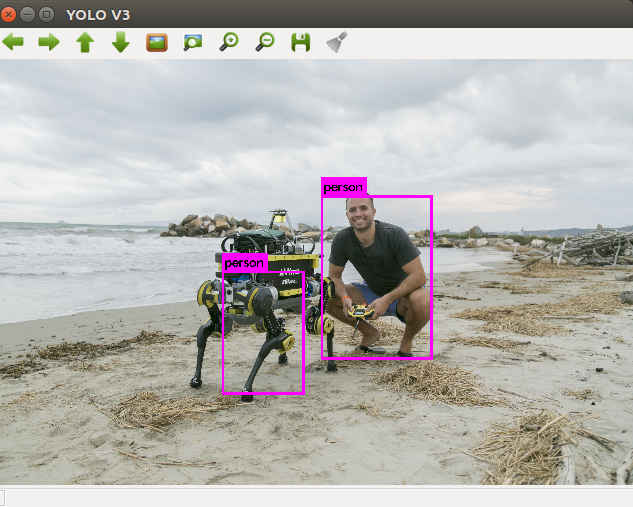
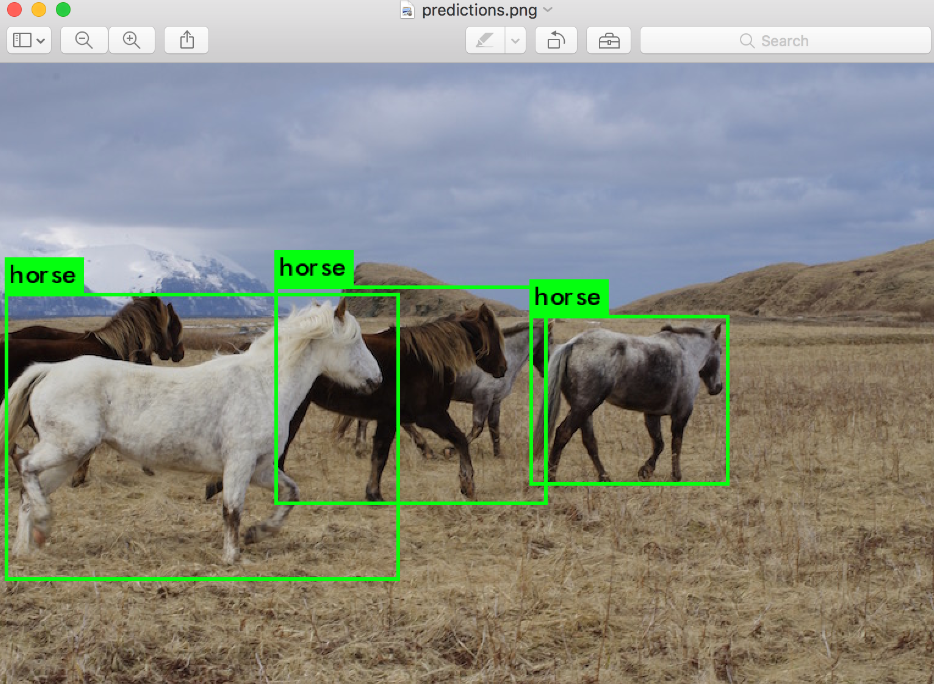
实时对象检测:darknet_ros 使用 YOLO 算法,能够在单次前向传递中同时检测图像中的多个目标。
多平台支持:该包可以在多种平台上运行,包括具有 GPU 加速的硬件和仅使用 CPU 的系统。
自定义检测:除了预训练模型,用户还可以根据自己的需求训练模型来检测特定的对象。
ROS 集成:darknet_ros 专门为 ROS 设计,可以轻松集成到基于 ROS 的机器人系统中。
高效率:在 CPU 上运行时速度较快,但在 GPU 上则能显著提高检测速度。
开源许可:darknet_ros 采用 BSD 许可,是一个开源项目。
持续更新:该项目由 ETH Zurich 的 Robotic Systems Lab 维护,预计会经常更新和改进。
安装 darknet_ros 需要 ROS 环境以及 OpenCV 和 boost 等依赖库。为了最大化性能,建议在 Release 模式下构建,并使用 CUDA 来加速 GPU 上的运行。
darknet_ros 的使用涉及多个步骤,包括从 GitHub 克隆项目、配置 CMake 和编译项目等。此外,还需要配置订阅和发布图像话题,以及调整网络参数文件,以便正确运行 darknet_ros。
以下是darknet_ros的一些主要应用场景:
1. 自动驾驶车辆:在自动驾驶汽车中,darknet_ros可用于实时检测和分类道路上的行人、车辆、交通标志等,从而提高车辆的安全性和自主导航能力。
2. 无人机监测:无人机在执行监测任务时,如农业监测、野生动物观察或灾害响应,可以使用darknet_ros进行对象检测,实时识别特定目标或异常情况。
3. 工业自动化:在工业环境中,darknet_ros可用于自动化检测生产线上的产品缺陷、分类物品或监控工作区域的安全状况。
4. 服务机器人:服务机器人,如酒店或医疗机器人,可以使用darknet_ros进行人脸识别、物体识别,以提供更个性化的服务。
5. 安全监控:在安全监控领域,darknet_ros可以帮助识别异常行为或未经授权的入侵者,提高监控效率和响应速度。
6. 农业机器人:在农业领域,darknet_ros可用于检测作物疾病、害虫或果实成熟度,帮助提高农作物管理的自动化水平。
7. 交互式机器人:在交互式机器人应用中,darknet_ros可用于识别用户的动作或表情,以提供更加自然和直观的交互体验。
8. 科学研究:在科学研究领域,darknet_ros可用于监测实验对象的行为,或进行野外环境中的生物多样性研究。
darknet_ros的实时性和准确性使其成为各种需要高性能对象检测应用的理想选择。通过集成到ROS系统中,它还可以轻松地与其他机器人技术和组件集成,提供完整的机器人解决方案。
ROS(Robot Operating System,机器人操作系统)是一个用于机器人软件开发的灵活框架,它提供了一套软件库和工具帮助软件开发者创建机器人应用程序。ROS并不是一个传统的操作系统,而是一个在现有操作系统之上的软件层,通常运行在Linux上。以下是ROS的一些关键特点:
分布式处理:ROS采用分布式计算模型,允许开发者将复杂的机器人应用程序分解为可重用的模块,这些模块可以在不同的计算机上运行,并通过网络进行通信。
消息传递:ROS使用基于话题(Topics)的消息传递系统,允许不同的模块之间进行异步通信。这些模块(称为节点)可以发布信息到特定的话题,也可以订阅其他模块发布的信息。
服务和参数服务器:除了话题,ROS还提供服务和参数服务器,服务允许节点以同步方式请求和响应数据,而参数服务器则用于存储和检索全局参数。
工具集:ROS提供了一系列工具,如 rqt_graph(用于可视化节点和话题的关系)、rviz(3D可视化工具)和 rosbag(用于记录和回放数据)等。
社区和生态系统:ROS拥有一个庞大的社区,提供了大量的软件包和工具,这些软件包涵盖了从传感器驱动到机器学习算法的各个方面。
跨平台:虽然ROS主要运行在Linux上,但也可以在其他操作系统上运行,如Mac OS和Windows。
支持多种语言:ROS支持多种编程语言,包括Python、C++和Java,使得开发者可以选择他们最熟悉的语言进行开发。
可扩展性:ROS的设计易于扩展,开发者可以根据需要添加新的模块和功能。
ROS广泛应用于研究和工业领域的机器人开发,包括自动驾驶汽车、无人机、家用机器人等。它的设计目标是简化机器人软件的开发,提高代码的重用性,并促进不同项目之间的合作。
官方文档:https://pjreddie.com/darknet/yolo/
镜像代码:
http://www.gitpp.com/kysq/darknet_ros
Tag: Github